







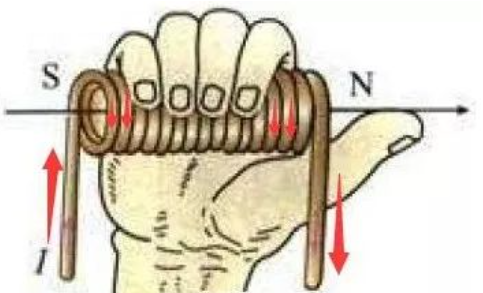
กฎมือซ้าย กฎมือขวา กฎมือขวากฎมือซ้ายนี้เป็นพื้นฐานสำหรับการวิเคราะห์แรงของการหมุนของมอเตอร์พูดง่ายๆ ก็คือเป็นตัวนำกระแสไฟฟ้าในสนามแม่เหล็กซึ่งจะได้รับผลกระทบจากแรง
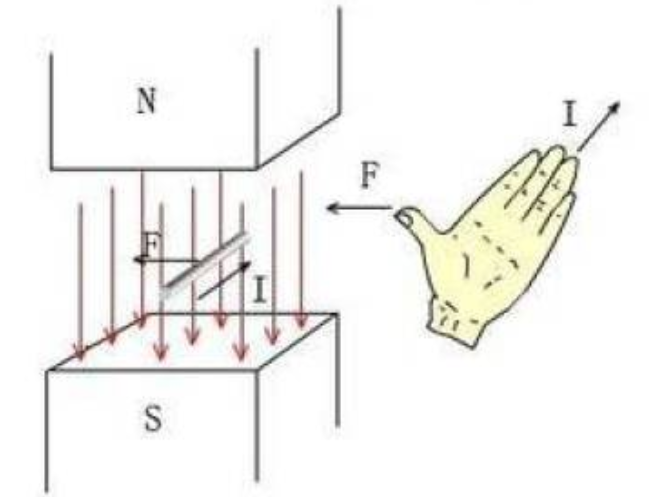
ให้เส้นสนามแม่เหล็กผ่านหน้าฝ่ามือ ทิศทางของนิ้วคือทิศทางของกระแส และทิศทางของนิ้วหัวแม่มือคือทิศทางของแรงแม่เหล็กแรงดึงจะตัดเส้นสนามแม่เหล็กเพื่อสร้างแรงเคลื่อนไฟฟ้า
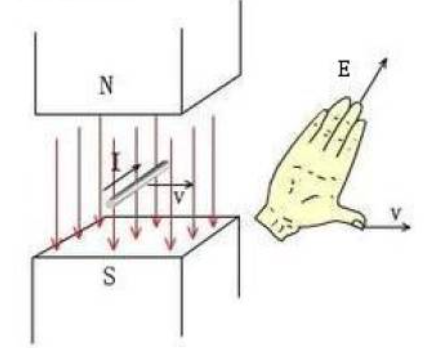
ให้เส้นสนามแม่เหล็กผ่านฝ่ามือ ทิศทางของนิ้วโป้งคือทิศทางการเคลื่อนที่ และทิศทางของนิ้วคือทิศทางของแรงเคลื่อนไฟฟ้าที่เกิดขึ้นทำไมต้องพูดถึงแรงเคลื่อนไฟฟ้าเหนี่ยวนำ?ฉันไม่รู้ว่าคุณมีประสบการณ์ที่คล้ายกันหรือไม่เมื่อคุณรวมสายไฟสามเฟสของมอเตอร์และหมุนมอเตอร์ด้วยมือ คุณจะพบว่าความต้านทานนั้นสูงมากเนื่องจากการเหนี่ยวนำเกิดขึ้นระหว่างการหมุนของมอเตอร์แรงเคลื่อนไฟฟ้าทำให้เกิดกระแส และกระแสที่ไหลผ่านตัวนำในสนามแม่เหล็กจะสร้างแรงตรงข้ามกับทิศทางการหมุน และทุกคนจะรู้สึกว่ามีแรงต้านต่อการหมุนมาก
สายไฟสามเฟสแยกจากกันและสามารถหมุนมอเตอร์ได้ง่าย
มีการรวมสายสามเฟสและความต้านทานของมอเตอร์มีขนาดใหญ่มากตามกฎของสกรูมือขวา ให้จับโซลินอยด์ที่มีพลังงานด้วยมือขวา เพื่อให้นิ้วทั้งสี่งอไปในทิศทางเดียวกับกระแสไฟฟ้า จากนั้นปลายที่ชี้ด้วยนิ้วหัวแม่มือคือขั้ว N ของโซลินอยด์ที่มีพลังงาน
กฎนี้เป็นพื้นฐานสำหรับการตัดสินขั้วของขดลวดที่มีพลังงาน และทิศทางของลูกศรสีแดงคือทิศทางปัจจุบันหลังจากอ่านกฎสามข้อแล้ว เรามาดูหลักการพื้นฐานของการหมุนของมอเตอร์กันส่วนแรก: แบบจำลองมอเตอร์กระแสตรง เราพบแบบจำลองของมอเตอร์กระแสตรงที่ได้รับการศึกษาในวิชาฟิสิกส์ระดับมัธยมปลาย และทำการวิเคราะห์อย่างง่ายด้วยวิธีการวิเคราะห์วงจรแม่เหล็ก
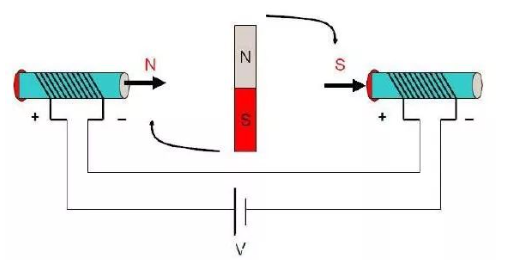
สถานะ 1 เมื่อจ่ายกระแสให้กับขดลวดที่ปลายทั้งสองตามกฎของสกรูขวามือ ความเข้มการเหนี่ยวนำแม่เหล็กที่ใช้ B (ดังแสดงโดยลูกศรหนา) จะถูกสร้างขึ้น และโรเตอร์ที่อยู่ตรงกลางจะพยายามทำให้ ทิศทางของเส้นเหนี่ยวนำแม่เหล็กภายในให้ไกลที่สุดทิศทางของเส้นสนามแม่เหล็กด้านนอกนั้นสอดคล้องกันเพื่อสร้างวงปิดของเส้นสนามแม่เหล็กที่สั้นที่สุด เพื่อให้โรเตอร์ด้านในหมุนตามเข็มนาฬิกาเมื่อทิศทางของสนามแม่เหล็กของโรเตอร์ตั้งฉากกับทิศทางของสนามแม่เหล็กภายนอก แรงบิดในการหมุนของโรเตอร์จะใหญ่ที่สุดโปรดทราบว่า "ช่วงเวลา" เรียกว่าใหญ่ที่สุด ไม่ใช่ "แรง"เป็นความจริงที่ว่าเมื่อสนามแม่เหล็กของโรเตอร์อยู่ในทิศทางเดียวกับสนามแม่เหล็กภายนอก แรงแม่เหล็กบนโรเตอร์จะมีค่ามากที่สุด แต่ในเวลานี้โรเตอร์อยู่ในสถานะแนวนอนและแขนบังคับเป็น 0 และของ แน่นอนว่ามันจะไม่หมุนนอกจากนี้ โมเมนต์เป็นผลคูณของแรงและแรงแขนถ้าค่าใดค่าหนึ่งเป็นศูนย์ ผลคูณจะเป็นศูนย์เมื่อโรเตอร์หมุนไปที่ตำแหน่งแนวนอน แม้ว่าจะไม่ได้รับผลกระทบจากแรงบิดในการหมุนอีกต่อไป แต่โรเตอร์จะยังคงหมุนตามเข็มนาฬิกาเนื่องจากความเฉื่อยในตอนนี้ หากทิศทางปัจจุบันของโซลินอยด์สองตัวเปลี่ยนไป ดังที่แสดงในรูปด้านล่าง โรเตอร์จะยังคงหมุนต่อไปหมุนไปข้างหน้าตามเข็มนาฬิกา
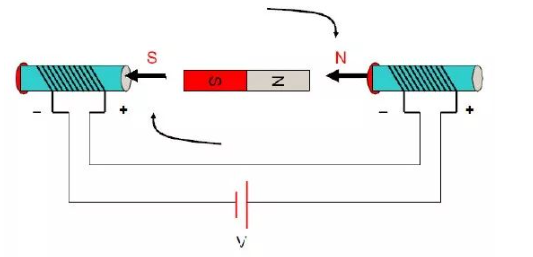
ในสถานะ 2 ทิศทางปัจจุบันของโซลินอยด์ทั้งสองจะเปลี่ยนแปลงตลอดเวลา และโรเตอร์ด้านในจะยังคงหมุนต่อไปการกระทำที่เปลี่ยนทิศทางของกระแสนี้เรียกว่า การสับเปลี่ยนหมายเหตุด้านข้าง: เมื่อใดที่จะเปลี่ยนจะเกี่ยวข้องกับตำแหน่งของโรเตอร์เท่านั้นและไม่เกี่ยวข้องโดยตรงกับปริมาณอื่น ๆส่วนที่ 2: มอเตอร์โรเตอร์ภายในสามเฟสสองขั้ว โดยทั่วไปแล้ว ขดลวดสามเฟสของสเตเตอร์มีโหมดการเชื่อมต่อแบบดาวและโหมดการเชื่อมต่อแบบเดลต้า และ "โหมดการนำไฟฟ้าแบบสอง-สองของการเชื่อมต่อแบบสามเฟสแบบสตาร์" เป็นโหมดที่ใช้บ่อยที่สุด ใช้ซึ่งใช้ที่นี่โมเดลนี้ใช้สำหรับการวิเคราะห์อย่างง่าย
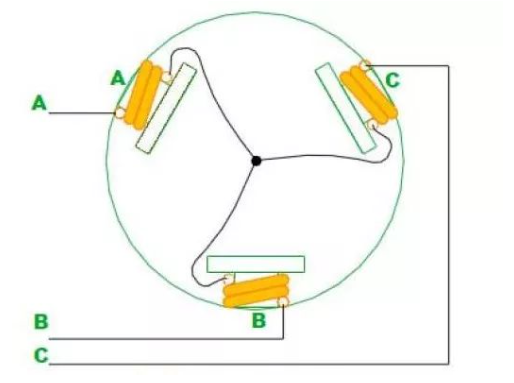
รูปด้านบนแสดงวิธีการเชื่อมต่อขดลวดสเตเตอร์ (โรเตอร์ไม่ได้แสดงเป็นแม่เหล็กสองขั้วสมมุติฐาน) และขดลวดทั้งสามเชื่อมต่อกันเป็นรูปตัว "Y" ผ่านจุดต่อตรงกลางมอเตอร์ทั้งหมดนำไปสู่สายไฟสามเส้น A, B, C เมื่อมีพลังงานสองต่อสองมี 6 กรณี ได้แก่ AB, AC, BC, BA, CA, CBโปรดทราบว่าเป็นไปตามลำดับ
ตอนนี้ฉันดูที่ระยะแรก: เฟส AB ได้รับพลังงาน
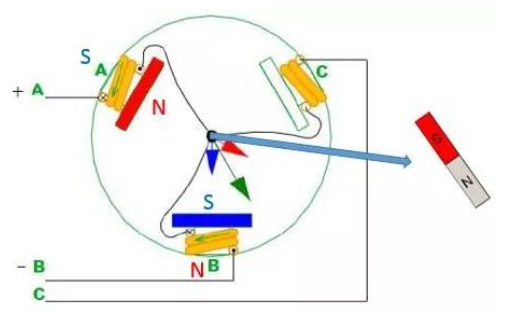
เมื่อเฟส AB ได้รับพลังงาน ทิศทางของเส้นสนามแม่เหล็กที่สร้างโดยขดลวดขั้ว A จะแสดงด้วยลูกศรสีแดง และทิศทางของเส้นสนามแม่เหล็กที่สร้างโดยขั้ว B จะแสดงด้วยลูกศรสีน้ำเงิน จากนั้นทิศทาง ของแรงลัพธ์แสดงด้วยลูกศรสีเขียว จากนั้นสมมติว่ามีแม่เหล็กสองขั้ว ทิศทางของขั้ว N จะตรงกับทิศทางที่แสดงโดยลูกศรสีเขียวตาม “โรเตอร์ที่อยู่ตรงกลางจะพยายามรักษา ทิศทางของเส้นสนามแม่เหล็กภายในสอดคล้องกับทิศทางของเส้นสนามแม่เหล็กภายนอก”สำหรับซีตอนนี้เขาไม่มีอะไรเกี่ยวข้องกับเขา
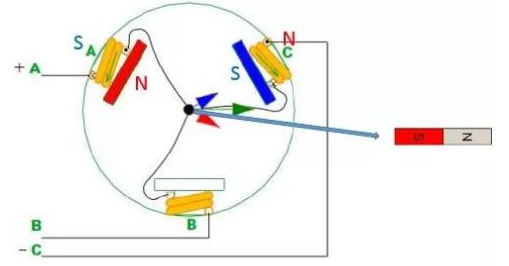
ขั้นตอนที่ 2: AC Phase Energized
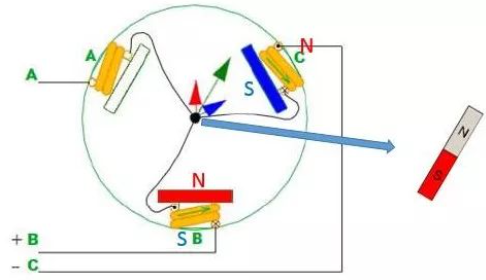
ขั้นตอนที่สาม: ไฟฟ้าเฟส BC
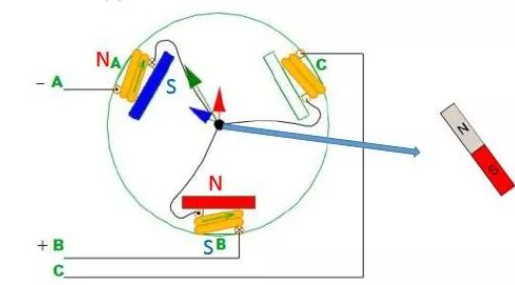
ขั้นตอนที่สาม: เฟส BA ได้รับพลังงาน
ต่อไปนี้เป็นแผนภาพสถานะของแม่เหล็กระดับกลาง (โรเตอร์): โรเตอร์แต่ละกระบวนการหมุน 60 องศา

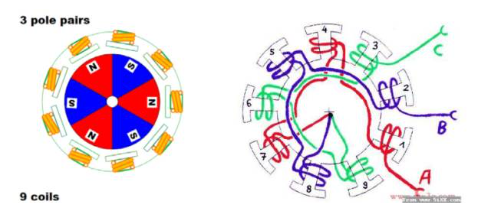
การหมุนเวียนทั้งหมดเสร็จสมบูรณ์ในหกกระบวนการ ซึ่งมีการเปลี่ยนหกครั้งส่วนที่สาม: มอเตอร์โรเตอร์ภายในหลายขั้วหลายขดลวดหลายเฟสสามเฟส มาดูจุดที่ซับซ้อนมากขึ้นรูปที่ (a) เป็นมอเตอร์หกขั้วสามเฟสเก้าขดลวด (สามเฟส, เก้าขดลวด, หกขั้ว)ขั้วตรงข้าม) มอเตอร์โรเตอร์ด้านใน การเชื่อมต่อที่คดเคี้ยวจะแสดงในรูป (b)ดังจะเห็นได้จากรูป (b) ว่าขดลวดสามเฟสเชื่อมต่อกันที่จุดกึ่งกลางซึ่งเป็นการเชื่อมต่อแบบดาวด้วยโดยทั่วไป จำนวนขดลวดของมอเตอร์ไม่สอดคล้องกับจำนวนขั้วแม่เหล็กถาวร (เช่น ใช้ขดลวด 9 ขดลวด 6 ขั้วแทน 6 ขดลวดและ 6 ขั้ว) เพื่อป้องกันไม่ให้ฟันของสเตเตอร์และ แม่เหล็กของโรเตอร์จากการดึงดูดและจัดตำแหน่ง
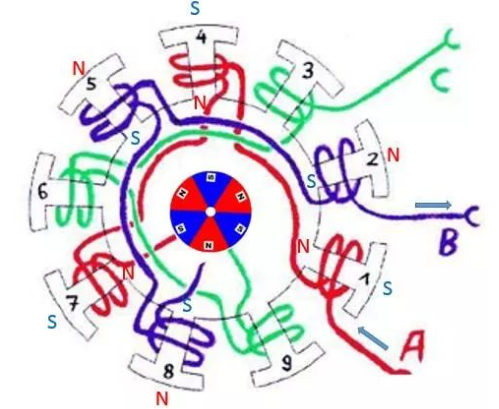
หลักการเคลื่อนที่ของมันคือ: ขั้ว N ของโรเตอร์และขั้ว S ของขดลวดที่มีพลังงานมีแนวโน้มที่จะอยู่ในแนวเดียวกัน และขั้ว S ของโรเตอร์และขั้ว N ของขดลวดที่มีพลังงานมีแนวโน้มที่จะอยู่ในแนวเดียวกันนั่นคือ S และ N ดึงดูดซึ่งกันและกันโปรดทราบว่าจะแตกต่างจากวิธีการวิเคราะห์ก่อนหน้านี้ยังไงก็ช่วยวิเคราะห์กันอีกทีนะครับระยะแรก: เฟส AB ถูกทำให้เป็นไฟฟ้า
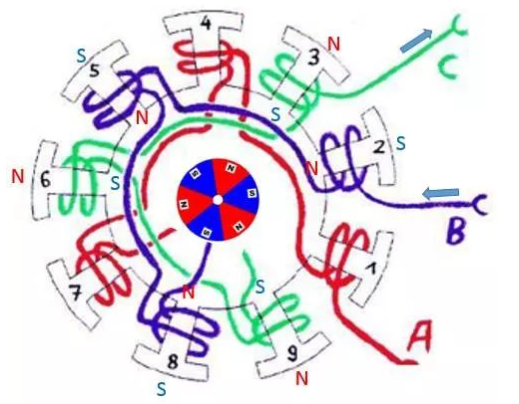
ขั้นตอนที่ 2: AC Phase Energized

ขั้นตอนที่สาม: ไฟฟ้าเฟส BC
เวลาโพสต์: ต.ค.-21-2565